IMU动态姿态测量单元基于ADI的MEMS传感器设计实现。
DM-IMU-3AH 结合了三个方向角速率陀螺仪, 三向加速度计,三轴磁强计,ADC 模数转换, 微控 制器等,通过创新性的数据融合滤波算法,无论在 静态和动态都能给出精确的方向和姿态。
DM-IMU-3AH 提供俯仰、滚转和方向三个欧拉 角,通过串口以数字格式输出。所有传感器经过完 全温度补偿和校正。输出模式和滤波参数等通过软 件可调,参数和计算的数据可以保存。
DM-IMU-3AH 既可以当作 IMU(惯性测量单元) 使用,也可以当作 VG(垂直参考系统)使用,以及 AHRS(航向,姿态测量系统)应用,可以说 DM-IMU -3AH 结合了用户的各种使用情况。
DM-IMU-3AH 利用三轴 MEMS 陀螺跟踪系统 动态的角度,三轴的 MEMS 加速度计和磁场计跟踪 静态的角度,而内置的处理器及控制器,通过融合 滤波算法,输出实时的角度。无论是在静态还是动 态情况下,或是在振动和快速的运动状态下,提供 了很高的响应,而且没有漂移。
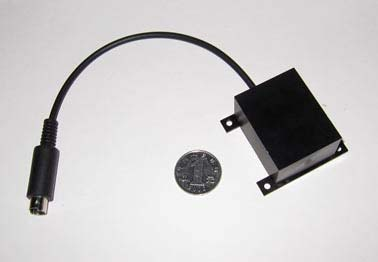
比一元硬币稍大的微型姿态测量模块
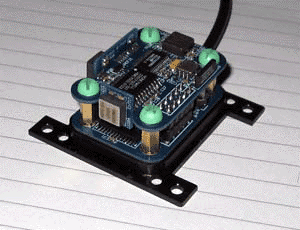
紧凑的内部设计
应用
• 无人飞机自动导航
• 船舶姿态的动态测量
• 水下交通工具的导航
• 姿态测量各种跟踪和稳定系统
• 车辆的导航与控制
• 机器人应用
• 与 GPS 结合
• 姿态参考
• 机器及制造业
校准
• 机械校准(对所有器件)
• 软件补偿(对 9 个传感器的零偏和比例系数温 度变化)
• 软件校正(对传感器的轴对准误差)
• 软件校正(对陀螺的 G-灵敏值)
• 硬磁和软磁的校准
• 每一个产品出厂校准文件
特征
• IMU, VG ,AHRS 模式小体积
• 轻的重量
• 低功耗
• 低成本
欲了解IMU技术详情或索取DM-IMU-3AH详细产品资料,敬请联系400-000-3462;
或添加东方迪码微信服务号“eastdima”
